-



-
- 高出力
- 省スペース
- フィールドバスインターフェース
- 高精度
- 耐環境性
- ロボティクス
- 電気フィードバック式
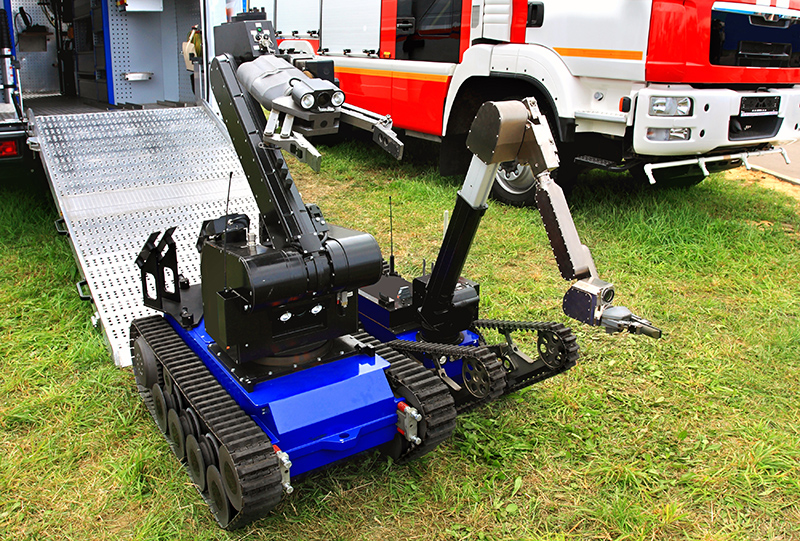
救助車両用ロボットアームを高出力かつ高精度制御
製品仕様
定格流量 30 ~ 1,500L/min 定格圧力 30 ~ 1,500L/min
技術・顧客課題
救助用装甲車両に搭載するマニピュレータ(ロボットアーム)の開発に際して、高出力と精度を併せ持つ制御開発の技術パートナーを必要としていた
ソリューション
重量物を取り扱うマニピュレータで、最も負荷が掛かる肩軸他の制御に油圧サーボ制御を採用しています。高度な油圧サーボ制御を取り扱う専門のムーグエンジニアが開発段階からお客様と共に活動し、ソリューションの提案、機器の選定、取扱への支援を行いました
-
事例概要・主な課題
救助用装甲車両に搭載されるマニピュレータは、災害現場などの過酷な現場での確実な動作と耐久性が求められます。そして災害現場での救出作業に際して、障害物の取り除き、重量物を持ち上げての取り扱いなど大きな力を必要とします。さらにマニピュレータを操作する救助隊員の意志通りにマニピュレータを動作させる制御能力、制御精度が求められます。この困難な要求に対してムーグは油圧サーボ制御を総合ソリューションとして提供しました。
-
特徴
このソリューションの核となる技術は、デジタルエレクトロニクスを搭載したアクチュエータ制御機能付きサーボ弁(ACV)が各軸を分散制御する事により、上位コントローラと制御に使用するセンサ間の配線を最低限のものとする省配線を実現しています。さらの搭載するデジタルエレクトロニクスは上位コントローラと制御センサとEtehrCATフィールドバスを介して通信するため、過酷な環境の中でも誤動作等のリスクを最小限にしたソリューションを提供しています。
油圧サーボ制御の経験が浅いお客様でも、用途に最適なソリューションを定め、安心して高度な油圧サーボ制御の導入に成功されています。 -
使用製品
パイロット式サーボ弁(フィールドバスインターフェース)
